

STEVE
“Artilithecus Ramidus”

**ÚLTIMA ACTUALIZACIÓN 08/09/16**
Nuestro nuevo robot cuyo nombre científico es “Artilithecus Ramidus”, será llamado “Steve”.
Antes de empezar es necesario saber que se hizo bien y mal en el anterior proyecto y que es lo que hay que tener en cuenta en este próximo proyecto.
Cosas que se hicieron mal:
- Principalmente ha faltado planificación
- Pegamos los servomotores al cuerpo del robot por lo que en el momento de tener que sustituir alguno teníamos que cambiar toda la parte.
- Cortamos los cables de los servomotores en la soldadura por lo que muchos de ellos los rompimos.
- Ha fallado el calibrado sensores caseros y de algunos componentes
- Algunos componentes usados no han dado el resultado esperado (mala calidad)
- Errores en el diseño del circuito eléctrico
- Hemos derrochado muchos componentes
- Los servomotores tenían poca fuerza aunque han servido
- Nos hemos precipitado en la elección de las herramientas
Cosas que se hicieron bien:
- El robot ha funcionado
- Placa con el nombre del proyecto
- El brazalete que contiene todos los componentes de los guantes
- La coordinación de los servos
- Estética
- El material (PLA) ha sido el correcto
- Funcionalidad mecánica
- Finalista FANTEC16
Cosas a tener en cuenta:
- Tener una mejor planificación
- Hacer bocetos
- Seleccionar los componentes adecuados
- No modificar los componentes que no son necesarios
- Diseñar con el fin de que se pueda reparar
- Cuidar la estética
- Seleccionar las herramientas adecuadas
- Diseñar bien los circuitos
- Cumplir al 100% las Tres Leyes de la Robótica
Leyes de la Robótica de Isaac Asimov
Ley nº 1: Un robot no hará daño a un ser humano o, por inacción, permitir que un ser humano sufra daño.
Ley nº 2: Un robot debe obedecer las órdenes dadas por los seres humanos, excepto si estas órdenes entrasen en conflicto con la 1ª Ley.
Ley nº 3: Un robot debe proteger su propia existencia en la medida en que esta protección no entre en conflicto con la 1ª o la 2ª Ley.
VÍDEO DE PRESENTACIÓN:
Funciones de “Steve”
- Se trata de un robot bípedo
- Tendrá tacto por lo que podrá “sentir” el dolor físico
- Tendrá un software de inteligencia artificial llamado “Artiligencia”
- Será un robot autorecargable (podrá detectar cuando le queda poca batería y cargarse el solo)
- Podrá detectar objetos y esquivarlos
- Podrá ser controlado a distancia mediante realidad aumentada
Nos hemos marcado el objetivo de terminarlo antes del 5 de Mayo de 2017.
Al tratarse de un proyecto complejo lo hemos dividido en sub-proyectos.
- Sub-proyecto: SENSORES DEL TACTO
- Fecha de iniciación: 18/06/2016
- Fecha de finalización: 05/07/2016
- Función: Se encarga de que el robot pueda “sentir” el dolor físico.
VÍDEO DE LOS SENSORES DEL TACTO:
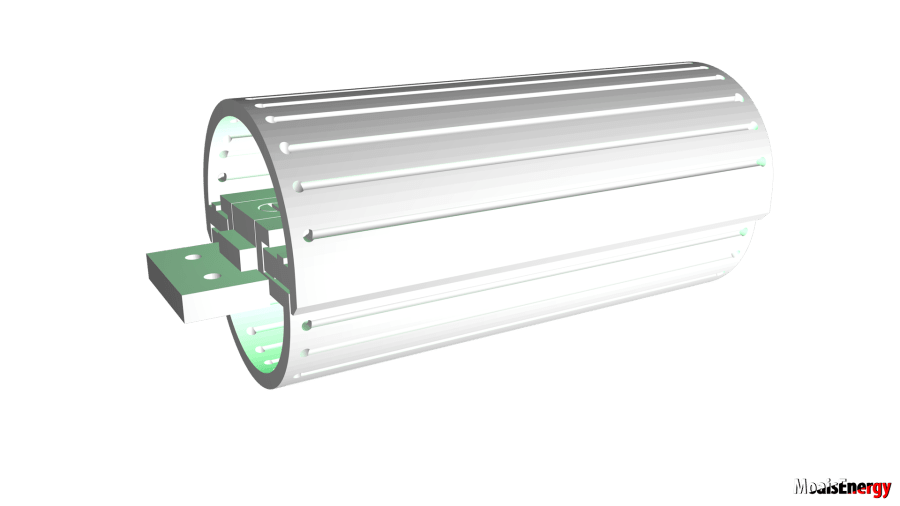
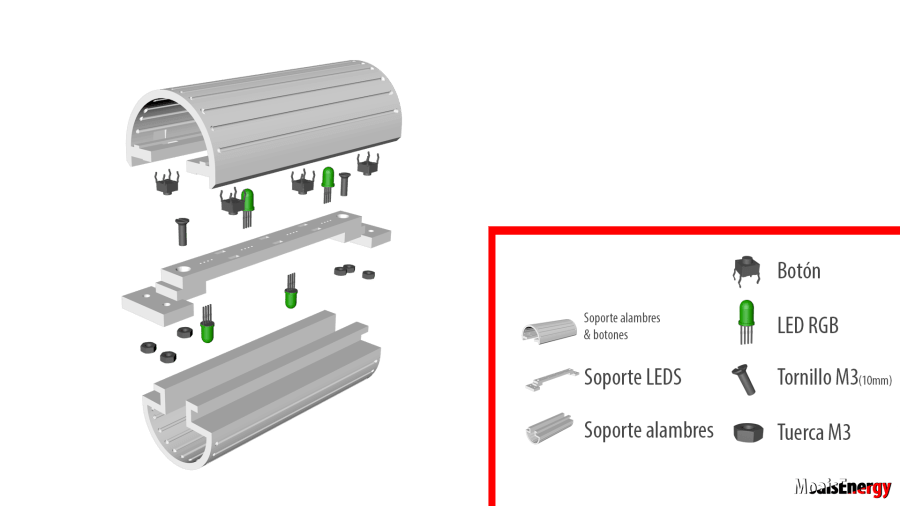
Este es el sensor del tacto. Como veis está formado principalmente por dos semicírculos con ranuras para que pasen unos alambres. Estos alambres son los encargados de detectar cuando un material conductor los está tocando (o incluso rozando) como puede ser una mano humana.
Para detectar el dolor, en su interior contiene 4 botones y cuando se aprieta las dos mitades con la suficiente fuerza los botones dejan pasar la corriente por lo que el Arduino UNO «sabe» que lo has presionado con demasiada fuerza.
Como podemos ver sobresalen dos piezas (una por cada extremo). Estas piezas sirven para sujeta el sensor a las articulaciones.
Resultado:
Conexiones en la protoboard:

Código:
/*
* Visita www.moaisenergy.com
* Creative Commons Reconocimiento-Compartir Igual 4.0 Internacional License
* Última edición el 08/09/2016 por Pablo García Jaén
*/
int valor=0;
int dolor=0;
void setup() {
Serial.begin(9600);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11, INPUT_PULLUP);
pinMode(2, INPUT);
}
void loop() {
dolor=digitalRead(11);
valor=digitalRead(2);
if((valor==0) && (dolor==1)) {
digitalWrite(9,LOW);
digitalWrite(10,LOW);
}
if((valor==1) && (dolor==1)) {
digitalWrite(9,HIGH);
digitalWrite(10,LOW);
}
if(dolor==0) {
digitalWrite(9,LOW);
digitalWrite(10,HIGH);
}
delay(10);
}
- Sub-proyecto: ARTICULACIONES
- Fecha de iniciación: 07/07/2016
- Fecha de finalización: __/__/201_
- Función: Se encarga de todas las zonas en las que el robot es capaz de moverse.
- TEST 1 (RODILLA&CODO)
La rodilla y el codo van a ser exactamente iguales ya que tienen una función igual.
")
")
")

Resultado:
En desarrollo…
- Sub-proyecto: ARTILIGENCIA
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Es el software que controla la parte de inteligencia artificial.
- Bocetos:
- Sub-proyecto: AUTORECARGABLE
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Se encarga de detecta cuando el robot se encuentra bajo de batería y se acerca a una “estación de recarga” para recargarse.
- Bocetos:
- Sub-proyecto: HARDWARE
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Se encarga de todos los motores, circuitos eléctricos, etc…
- Bocetos:
- Sub-proyecto: CONTROL REMOTO
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Es la parte gracias a la cual podemos controlar a Steve mediante un sistema de realidad aumentada.
- Bocetos:
- Sub-proyecto: DETECTAR Y ESQUIVAR OBJETOS
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Se encarga de detectar y esquivar posibles obstáculos. Este subproyecto posiblemente será realizado junto al de “Artiligencia”.
- Bocetos:
- Sub-proyecto: ENSAMBLAR TODAS LAS PARTES
- Fecha de iniciación: __/__/201_
- Fecha de finalización: __/__/201_
- Función: Es la parte final de proyecto. En este sub-proyecto unimos todas las anteriores partes para que el robot funcione correctamente.
- Bocetos:
*** SI QUIERES PARTICIPAR EN ESTE PROYECTO, TANTO PARA IDEAS, ENCARGARTE DE UN SUB-PROYECTO, APOYAR ECONÓMICAMENTE O SIMPLEMENTE APOYARNOS MORALMENTE ESCRÍBENOS UN CORREO A: moaisenergy@gmail.com

Artilithecus Ramidus by Pablo García Jaén is licensed under a Creative Commons Reconocimiento-Compartir Igual 4.0 Internacional License.
Puede hallar permisos más allá de los concedidos con esta licencia en https://moaisenergy.com/acerca-de/
