

SENSOR TACTO
- TEST 1
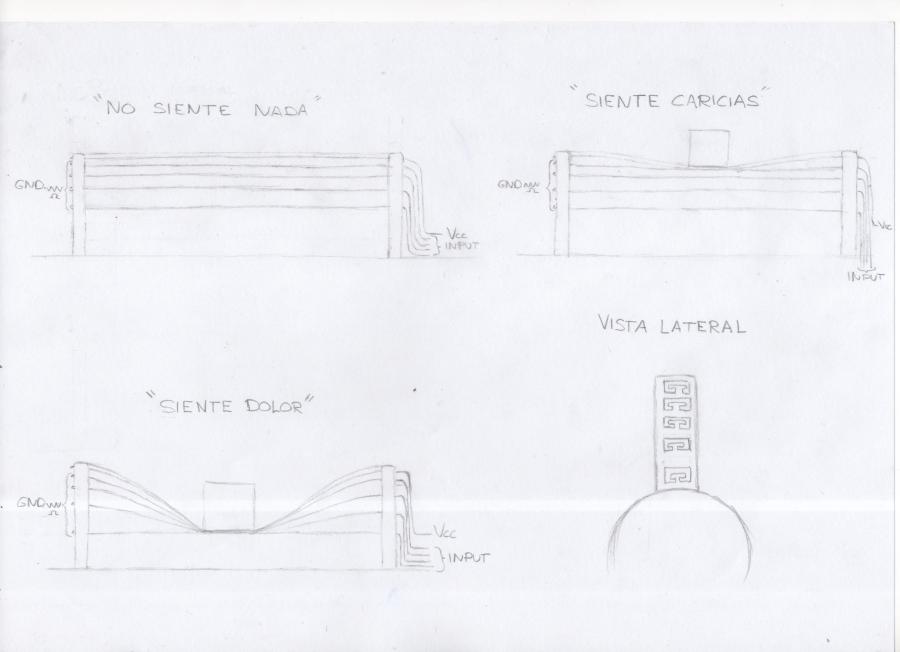
Tras analizar el primer boceto nos hemos dado de que 5 grados de dolor (las líneas que aparecen en el dibujo excepto la primera que es la piel) es demasiado. Hemos decidido disminuir este número a tres.

Al imprimirlo nos dimos cuentas de que este diseño no valía así que diseñamos otro.
- TEST 2


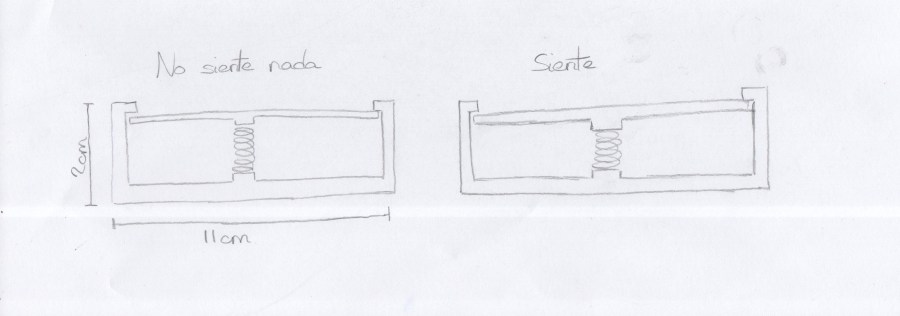
En este caso hemos utilizado muelles en lugar de gomillas elásticas. Hemos fallado en la anchura de los muelles así que hemos hecho una versión mejorada.
- TEST2.1
Este modelo es casi igual que el anterior lo único que cambia es la anchura de los muelles y la forma de la parte superior (la roja) para que encajara a la perfección.

Una vez impreso nos dimos cuenta que si presionábamos en el medio la pieza roja no bajaba correctamente así que hicimos otro modelo con solo un muelle.
- TEST 3

Una vez vez impreso nos surgió otro problema. No podíamos garantizar que, el 100% de las veces, la pieza roja hiciera contacto con los orificios de la pieza blanca. Así que nuevamente tuvimos que cambiar de diseño.
- TEST 4
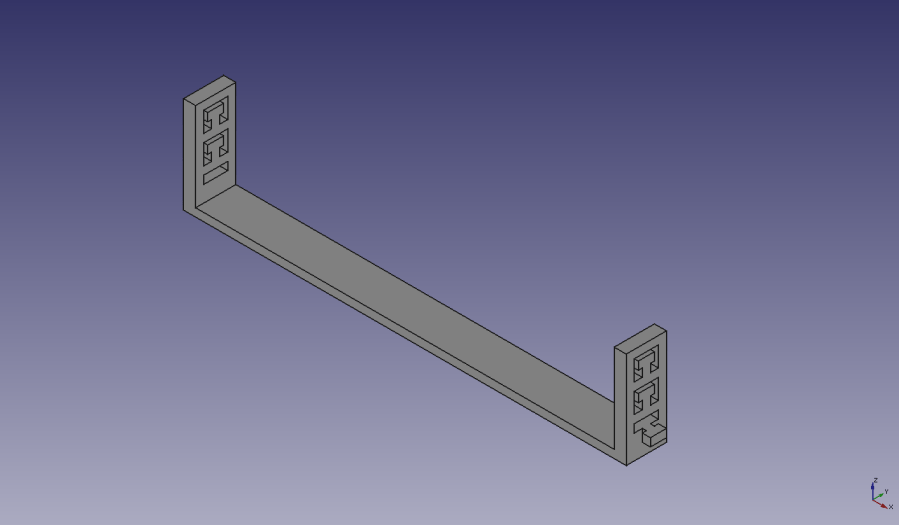
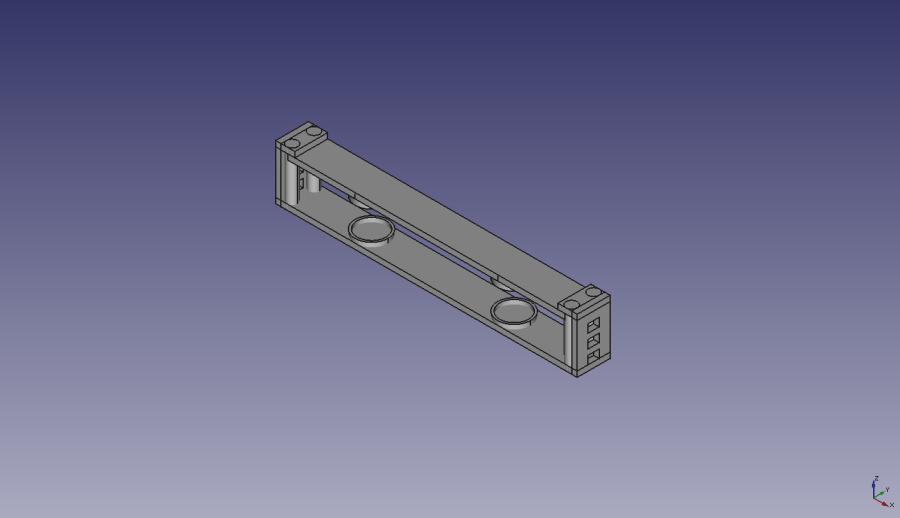
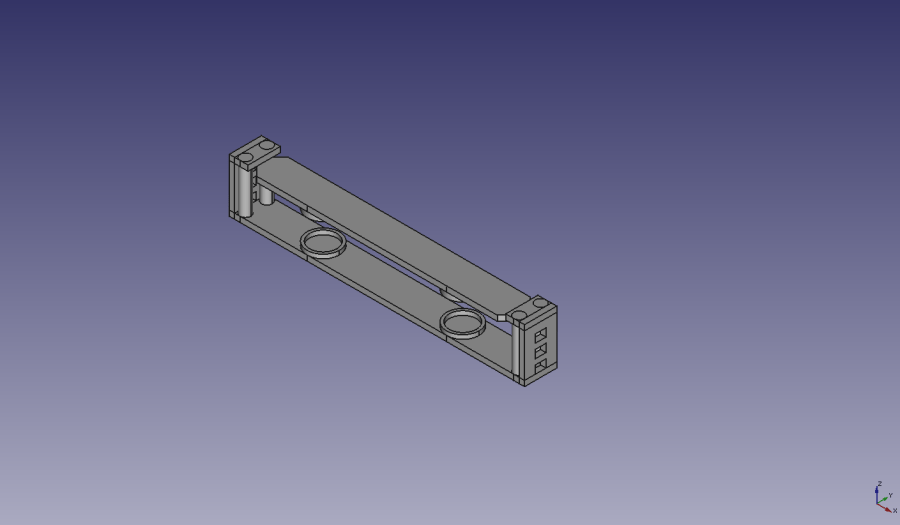
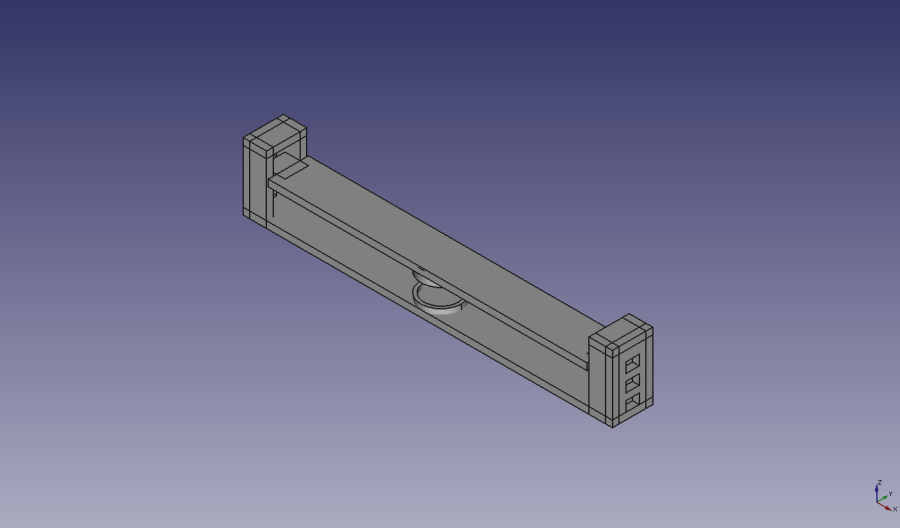
Este diseño lo hemos hecho totalmente diferente a los anteriores. Está divido en dos partes. Cuando el semicírculo de arriba es presionado fuertemente choca con el semicírculo de abajo activando unos botones y el robot «siente dolor». Todo está recubierto de alambres(que pasan por las muecas que se aprecian en el diseño). Cuando tocas con la mano estos alambres creas una resistencia entre dos o mas de los alambres y el arduino es capaz de leerlo.


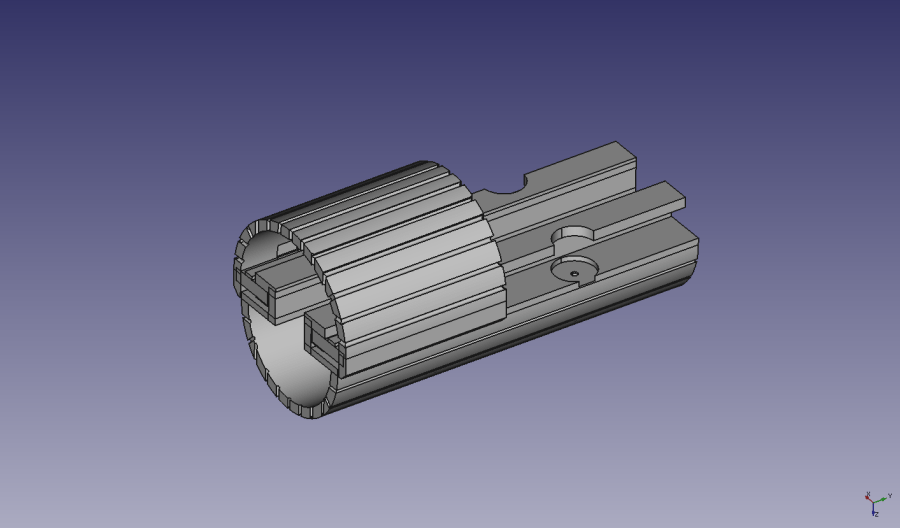
 TEST 4(3)")
 TEST 4(2)")
 TEST 4(1)")
Este diseño parece estar buen encaminado pero nos hemos confundido en las dimensiones.
